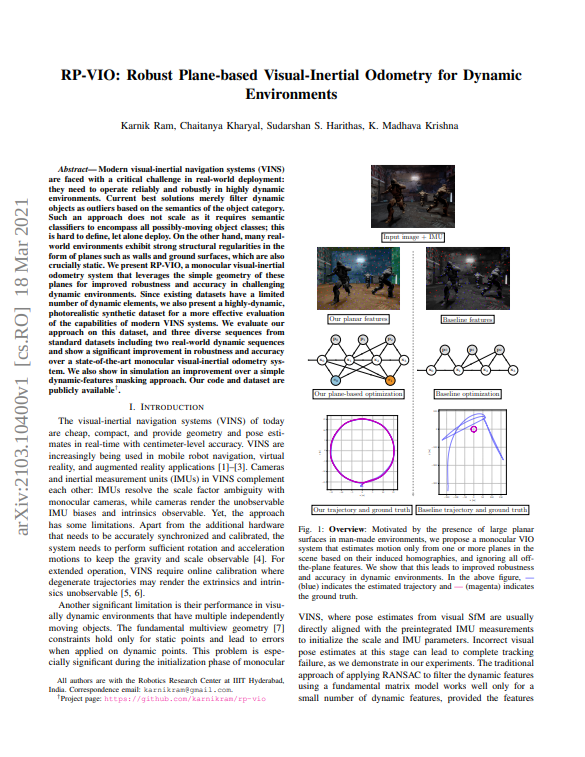
Motivated by the presence of large planar
surfaces in man-made environments, we propose a monocular VIO
system that estimates motion only from one or more planes in the
scene based on their induced homographies, and ignoring all offthe-plane features. We show that this leads to improved robustness
and accuracy in dynamic environments.
Abstract
Modern visual-inertial navigation systems (VINS) are faced with a critical challenge in real-world deployment: they need to operate reliably and robustly in highly dynamic environments.
Current best solutions merely filter dynamic objects as outliers based on the semantics of the object category. Such an approach does not scale as it requires semantic classifiers to encompass all possibly-moving object classes; this is hard to define, let alone deploy.
On the other hand, many real-world environments exhibit strong structural regularities in the form of planes such as walls and ground surfaces, which are also crucially static.
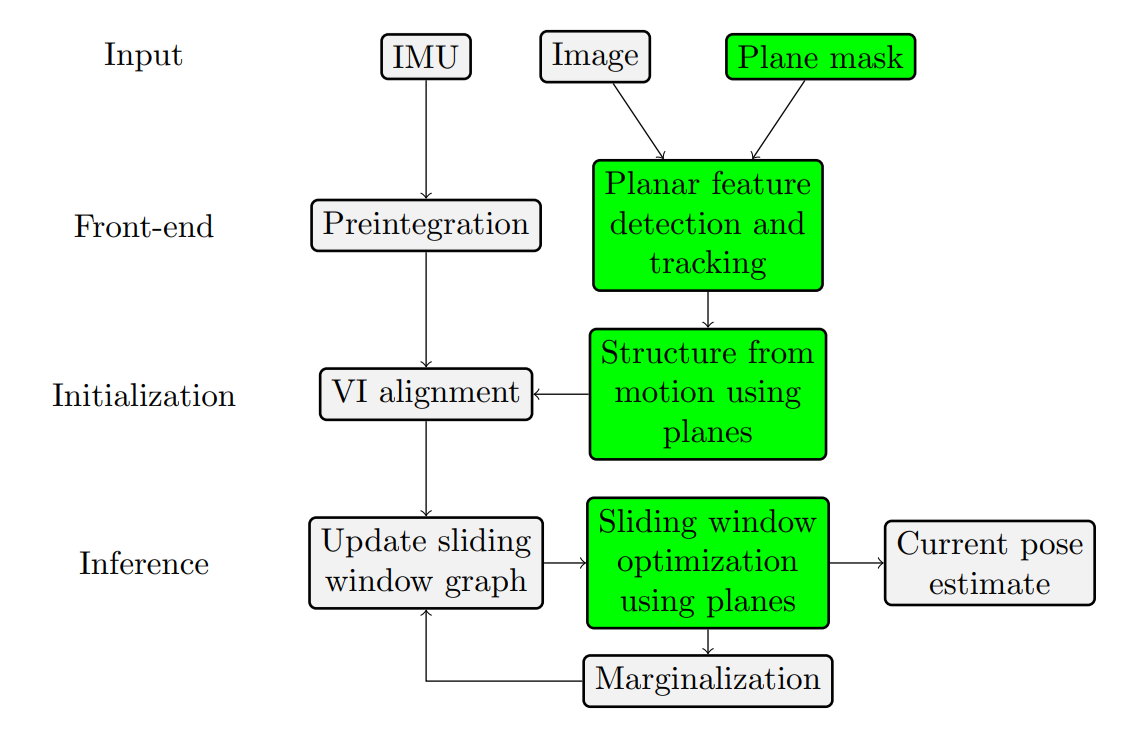
We present RP-VIO, a monocular visual-inertial odometry system that leverages the simple geometry of these planes for improved robustness and accuracy in challenging dynamic environments.
Since existing datasets have a limited number of dynamic elements, we also present a highly-dynamic, photorealistic synthetic dataset for a more effective evaluation of the capabilities of modern VINS systems.
We evaluate our approach on this dataset, and three diverse sequences from standard datasets including two real-world dynamic sequences and show a significant improvement in robustness and accuracy over a state-of-the-art monocular visual-inertial odometry system.
We also show in simulation an improvement over a simple dynamic-features masking approach. Our code and dataset are publicly available.
Paper
RP-VIO: Robust Plane-based Visual-Inertial Odometry for Dynamic Environments
Karnik Ram, Chaitanya Kharyal, Sudarshan S. Harithas, K. Madhava Krishna
@INPROCEEDINGS{rpvio,
author={Ram, Karnik and Kharyal, Chaitanya and Harithas, Sudarshan S. and Madhava Krishna, K.},
booktitle={2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
title={RP-VIO: Robust Plane-based Visual-Inertial Odometry for Dynamic Environments},
year={2021},
pages={9198-9205},
doi={10.1109/IROS51168.2021.9636522}
}